指南車の機構を利用したライントレース・ソーラーカー 08.08.15.
1.はじめに
タイトルが長いですが,下の動画のソーラーカーです.
車体の向きが変わっても,太陽電池の向きは変わらないところが特長です.
もともとは,「 平成20年度 やまなしエコエネルギーコンテスト 自律型ソーラーカー競技」 に出すために作ったものです.
残念ながらルールが変更され,エントリーを断念してしまいましたが,
せっかく作ったので,誰かに伝えてみようかなと.
2.想定していた競技内容
ソーラーカーによるライントレース競技で,おおまか下記のような内容でした.
- スタートからゴールまで,手を触れてはならない.
- ソーラーカーの大きさは250mm×250mm×250mm以内.
- 太陽電池以外の電池を搭載することは禁止.コンデンサは搭載可能.
- コースは,幅19mmの絶縁ビニルテープ.全長15.6m.
- コースは屋外に設置する.
- 一部,日陰がある.
- 制限時間は3分.
それなりに難しい競技だと思います.
3.コンセプト
ソーラーカー,あるいはこの競技で求められる性能はだいたいこんな感じだと思います.
- 速いこと.
- 軽いこと.
- 消費する電力が小さいこと.
- 発電できる電力が大きいこと.
- 正確にライントレースができること.
ロジックとFETだけの消費電力の小さい制御回路と,高価でも高性能なモータの組み合わせで作るのが強いわけですが,
これでは,あまりに普通で面白くない.と考え,4,5を採ることにしました.
(ここらへんが,新しいルールに適応できなくなった原因です.)
制御回路には,マイコンを使います.
これで必ずしも正確なライントレースができるというわけではないですが,
コースが複雑な場合などに,調整が楽という点で有利です.
発電効率を上げる方法として,MPPT(Maximum Power Point Tracker)というものがあります.
太陽電池は,取りだそうとする電圧・電流によって取り出せる電力が変化します.
この電力が最大となる点が最適動作点で,さらに光量や温度によっても変化します.
この最適動作点を追いかけながら発電するのがMPPTで,実際に広く使われているらしいです.
が,ちょっと調べてみたところ,
「こんなハイテクは,よく解らない.」
と思い,もっと見た目でわかりやすい方法を採ることにしました.
そんなわけで,指南車の仕組みを利用することにしました.
4.指南車で発電効率を上げる
太陽電池の発電効率を上げる一番簡単な方法は,太陽電池を太陽に向けることです.
しかし,多くのソーラーカーの太陽電池は真上を向いています.
それは,なぜか?
答えは簡単で,太陽電池を太陽に向けていても,車体の向き変わると一緒に向きが変わってしまうから.
真上を向いていれば,いつもだいたい真上を向いています.
そこで「 指南車 」です.
指南車とは,紀元前に中国で発明され,戦や儀式に使われていたとされる「からくり装置」です.
下の車の部分の向きを変えても,上の人形は常に同じ方向を示す.というものです.
指南車の下の車の部分をライントレースカーにして,上の人形の部分を太陽電池にしたら,
いつでも太陽電池は太陽の方を向いている,ライントレース・ソーラーカーを作れます.
どれくらい効率が向上するかを考えてみます.
まず,ソーラーカーを走らせる場所と時間を考えます.
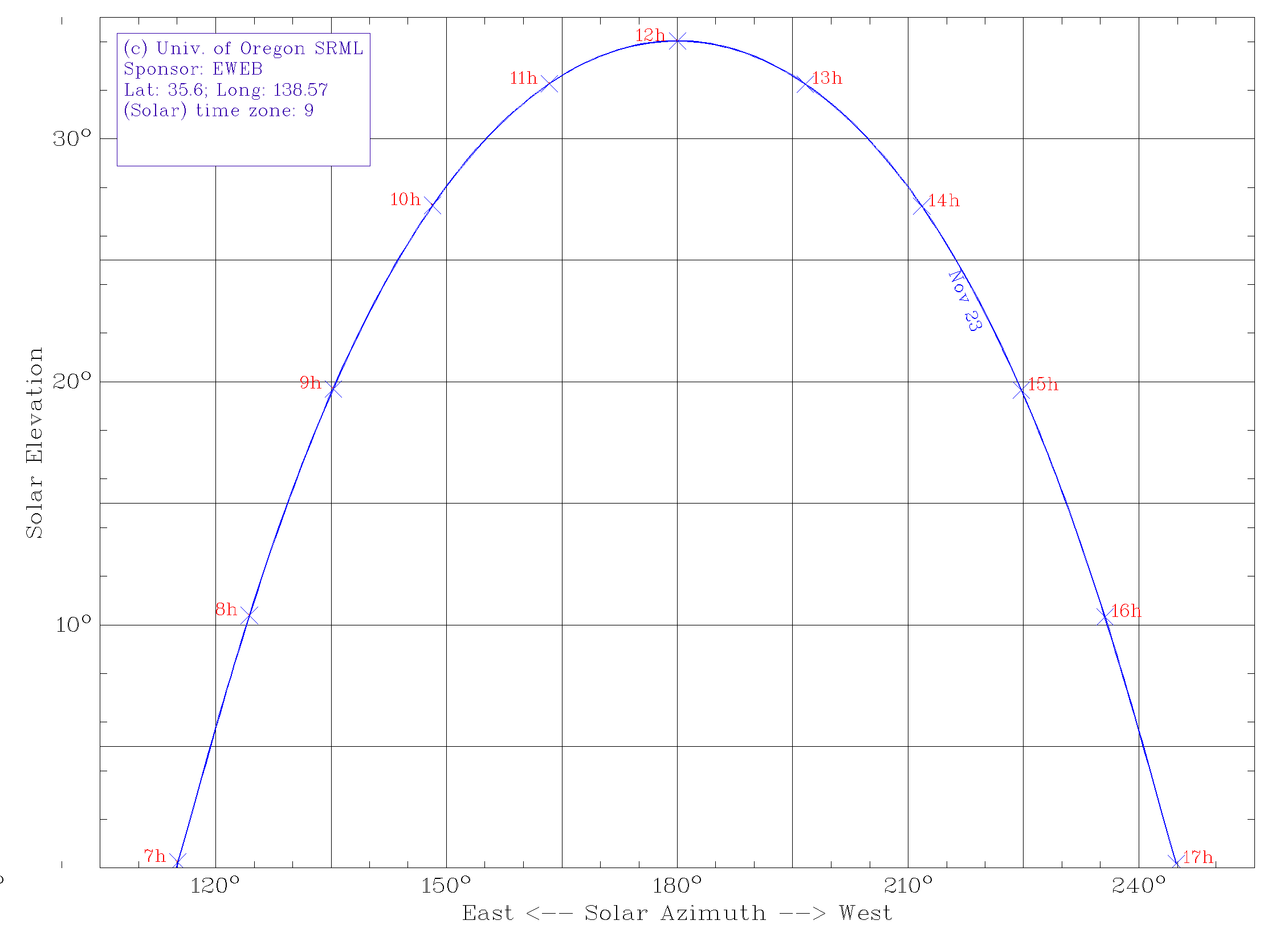
場所は,「アイメッセ山梨」…経度(Longitude)138.57,緯度(Latitude)35.60
時間は,たぶん,08年11月23日頃の,10時頃から14時頃だと考えました.
(実際は,小瀬スポーツ公園 体育館…経度138.59,緯度35.62 08年11月16日となりました.)
次に,これらの条件から,太陽の高さを考えます.
「UO SRML:Sun chart program」のページ (オレゴン大学さん?)で,調べられました.
結果のグラフ を出力してくれます.素晴らしいです.
{kind=link}
このグラフによると,太陽の高さは正午(最高)でも34°,10時と14時では27°しかありません.
意外に低いです.
おおざっぱに平均30°として,考えてみます.
普通に(水平に)太陽電池パネルを取り付けた図です.
真上(90°)から光が当たる場合と,30°から光が当たる場合を比べると,
たぶん,
30°では,パネルに入る光は,50%になってしまいます.(sin30°=0.5)
したがって,太陽電池を傾けて太陽に向けられれば,
効率100%UP!(当社比)
グラフにするとこんな感じ.
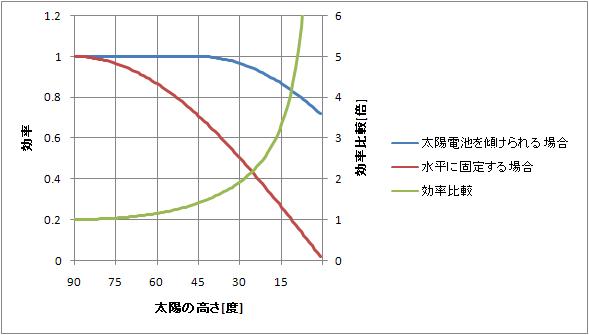
太陽電池に直角(90°)に日光が入る場合を1としています.
太陽の高さが低くなるにしたがって,効率は低下します.
太陽電池を傾けることで,この効率の低下を押さえることができます.
45°から効率が低下しているのは,後のメカの設計の都合で,45°までしか傾けられなかったためです.
それでも,30°で約2倍の効率となっています.
また,太陽が低くなるほど有利になります.
実際には,いろいろな部品が増えるため,重量がかさみます.
しかし,
- 発電効率が2倍になるのなら,それくらいのハンデはひっくり返せるのではないか?
- 最重量物の太陽電池の慣性モーメントをキャンセルでき,旋回性能は上がる.
- 見た目でわかりやすい.
5.メカの設計と製作
歯車の構成については,「 やさしくわかる 歯車のしくみ 小林義行著 誠文堂新光社
作りやすいように適当に調整し,下の図のようにしました.
独立2輪駆動の3輪車です.
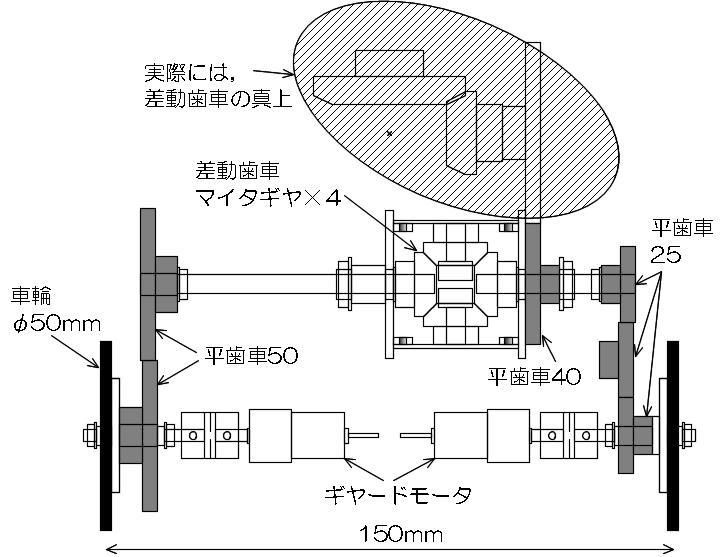
上から見た図
左右の車輪が同じだけ回転する場合は,差動歯車の左右の軸がそれぞれ反対に回転し,差動歯車のケースは回転しない.
左右の車輪の回転に差がある場合は,その差の1/2だけ差動歯車のケースが回転する.これを車体上部に伝える.
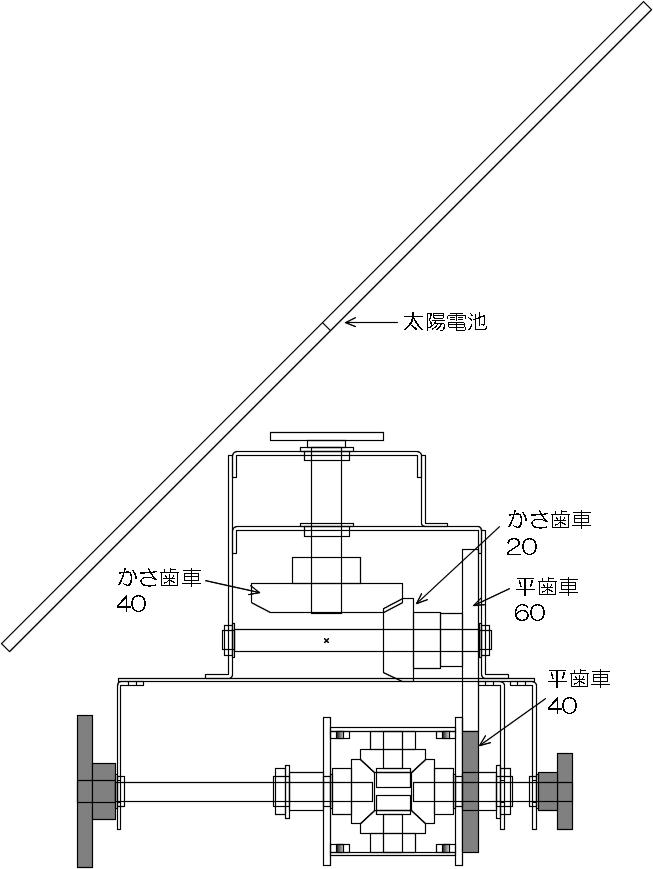
後から見た図
車体下部の差動歯車から伝わる回転から,太陽電池を回転させる.
この回転が,ちょうど車体の回転と反対になるため,太陽電池は常に同じ方向を向く.
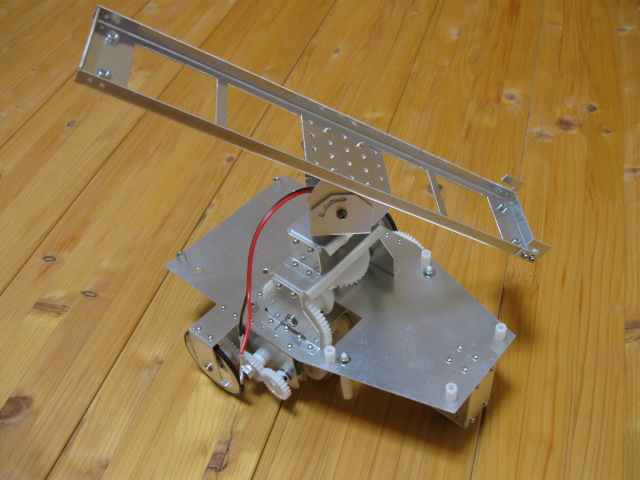
車体全体.
板の部分は,1mm厚のA5052アルミ板を切断,折り曲げ.
車輪,シャフトなどは,A2017の棒材,板材を削りだし.
ギヤは,KHK製のモジュール0.8のものに追加工.
(かさ歯車だけは,モジュール1.0)
結合は,主にM2のねじを使用.
車体の重量は,334g.
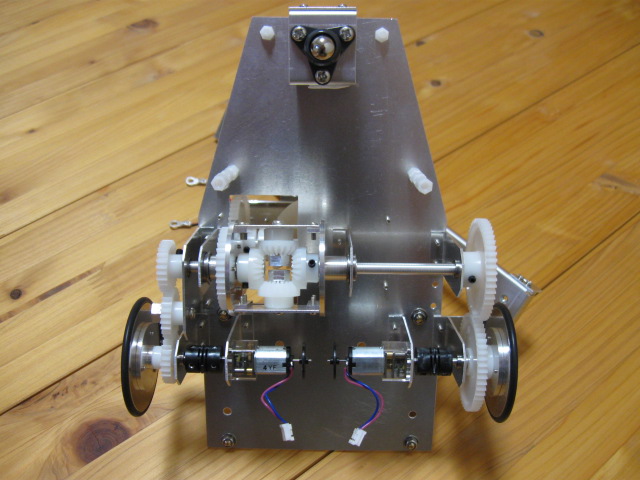
車体裏側.
ライントレースカーとしては,もっとも簡単な独立2輪駆動型.
モータは,普通に買えそうなものの中で一番小型の「栄42A(S.T.L. Japan)」です.
強度が心配なので,カップリングを介して車軸に接続しています.
キャスタも,軽そうなタミヤのボールキャスタを使用.
しかし,これはあまり動きがスムースではないです.
6.回路の設計と製作
回路は発電効率の高さを期待して,あまり節電を重視していません.
節電よりも,ハードウェア・ソフトウェアの作りやすさを優先してしまいました.
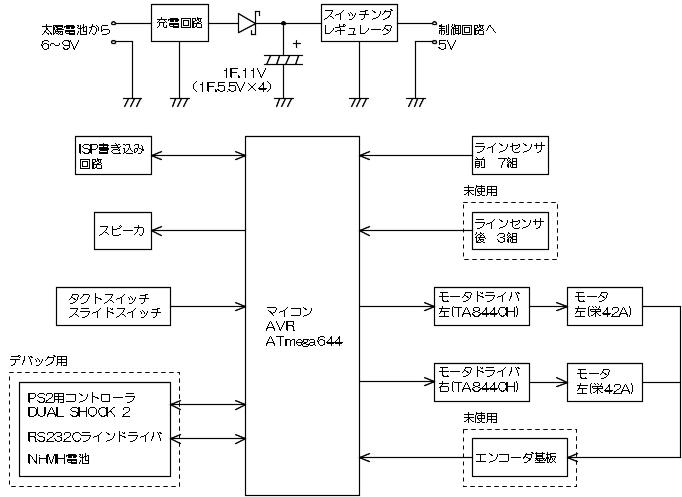
電気二重層コンデンサは,レギュレータよりも前に置いています.
太陽電池をコンデンサに直結すると起動時の効率が悪くなるので,充電回路の部分で適当に制限しています.
図中の破線のものは未実装です.
ラインセンサ3組とエンコーダ基板は節電のため取り外しました.
デバッグ用とある部分は,室内でも動かす場合やマイコンの動作を見る場合に使います.
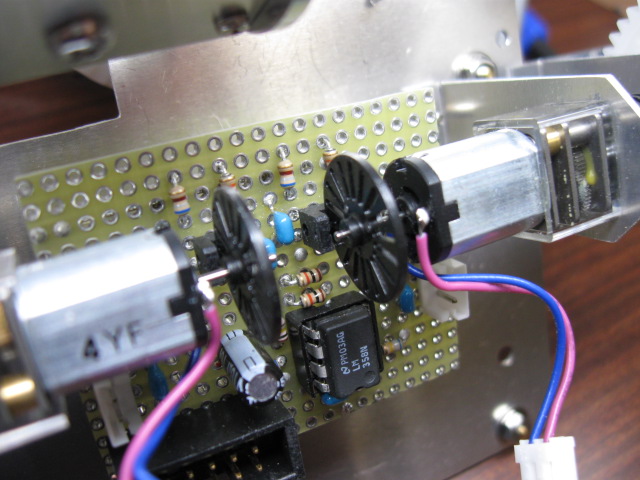
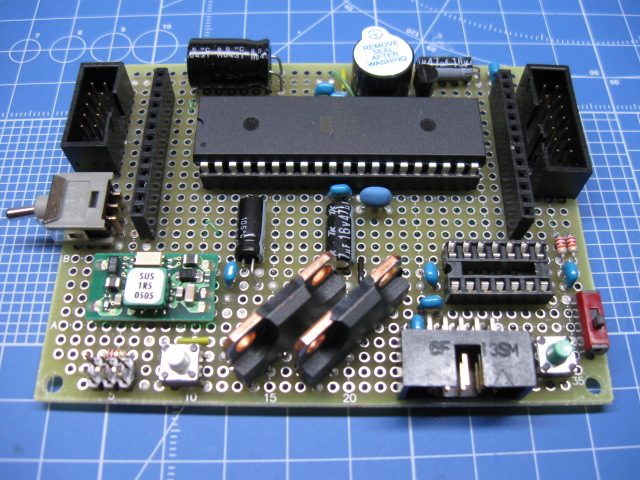 制御基板.
制御基板.スイッチングレギュレータから後の部分がこの基板にあります.
スイッチングレギュレータ(コーセルSUS1R50505)の定格電流が300mAなので,
二次側のコンデンサを1000uFと大きくしています.
100uF程度では,マイコンがリセットしてしまいました.
マイコンは,AtmelのATmega644Pです.
I/Oの数で選んだだけなので,使用しているプログラムメモリは,わずか4%程度です.
(それだけいい加減なプログラム.)
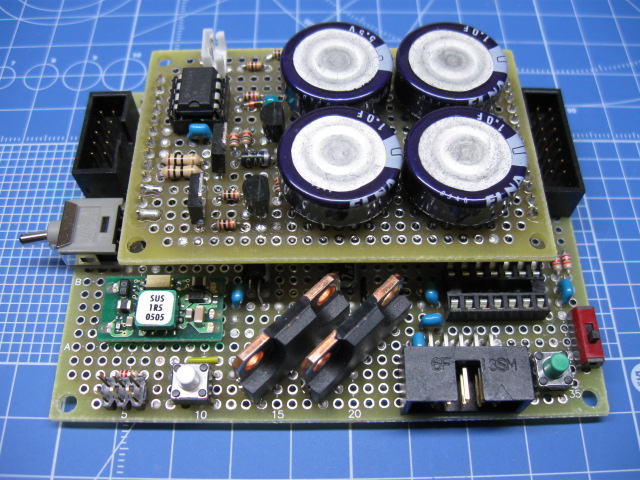
電源基板は,制御基板に重ねて使用します.
一番自信がないのが,この電源基板で,
設計変更が楽なように,分離しています.
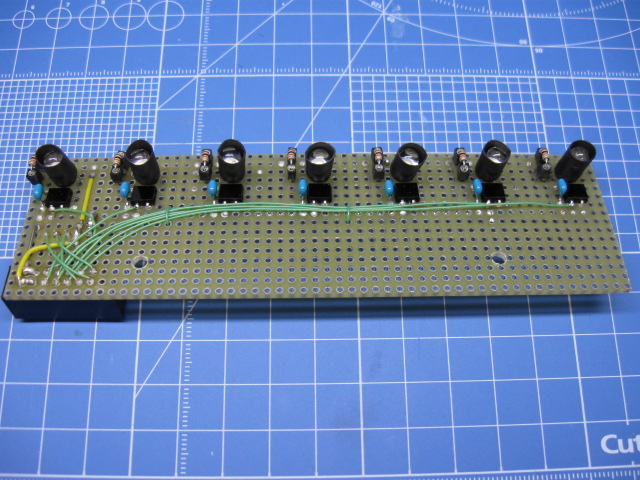
センサ基板(前).
ロボコンなどでよく使用される浜松ホトニクスの光変調フォトIC(S7136)です.
変調をかけてくれるため,外乱光が強いとされています.
赤外線LEDの電流制限抵抗は,固定抵抗器をソケットに挿しています.
調整はこれの差し替えで行います.
半固定抵抗器は,許容電力がよくわからなかったのでやめました.
赤外線LEDは裸で使うと,出した光が直接センサに入ってしまいうまく動かないので,
熱収縮チューブを被せています.
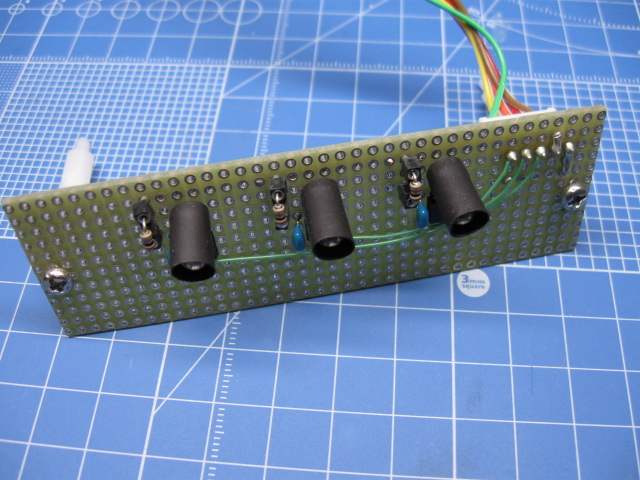
センサ基板(後).
節電のため,取り外しました.
エンコーダ基板.
モータに付けたエンコーダ盤と,フォトインタラプタで,
回転数パルスを作ります.
が,節電のため,取り外しました.
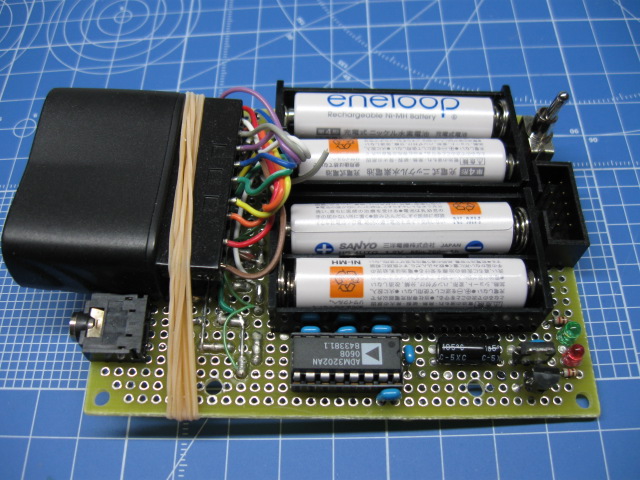
最初からソーラーカーにしてしまうと,昼間しか動かせないので,
電池で動かせるようにするための基板です.
ソーラーカーとして動かす場合は外します.
ついでに,パソコンと繋ぐためのRS232Cラインドライバと,
リモコン操作するための,PS2用コントローラを接続しています.
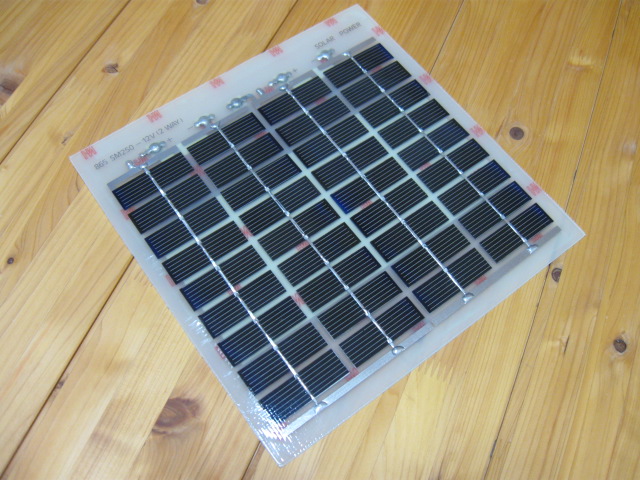
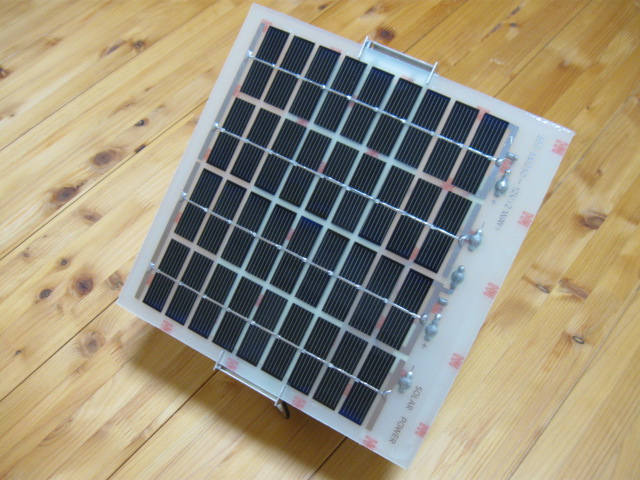
太陽電池パネル.(秋月電子通商で購入.)
大きさ240mm×240mm.大きさがちょうど良いので採用しました.
6V,200mAのモジュール2つに分かれており,
並列で6V,400mAか,直列で12V,200mAか選んで使えます.
今回は6V,400mAとして使用しています.
ただし結構重く,これだけで300gもあります.
車体の重さと大して変わらない.

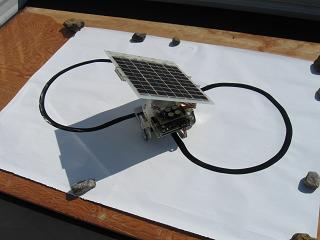
組み立てるとこうなります.
ラインセンサは変調がかかるタイプですが,さすがに直射日光は厳しいようなので,
ボール紙でカバーを作りました.
この状態で,重さは820g.結構重いです.
反対側から見るとこうなります.
太陽電池で,車体がすっかり隠れます.
バランスが悪いように見えますが,現在のところ転倒したことはありません.
7.テスト走行
実際に走らせてみた様子です.

08年8月9日(土).
良い感じに晴れていました.ソーラーカー日和です.

テストコースは,軽トラックの荷台にコンパネと紙を敷いて作りました.
柵もついているし,移動も自在です.
テスト走行の様子です.(動画 約18MB)
この動画は,08年8月9日の午後3時20分頃に撮ったものです.
先のオレゴン大学さん?のページで調べると,
太陽の高さは,43度くらいです.
太陽電池を水平に取り付ける普通のソーラーカーと比較して,
約1.4倍の効率で日光を受けていることになります.
この重さにしては,よく走ります.
いつもこんなにうまく走るわけではないですが.

低いところからの見るとこんな感じです.
(これは午後2時ころ撮影.動画 約7MB)
差動歯車の動きが,かっこいいなぁと.
8.まとめ
「指南車の機構を利用したライントレース・ソーラーカー」という目標はなんとか達成できました.
・太陽の高さに合わせて,太陽電池パネルを傾けられます.(手動)
・車体の方向が変わっても,太陽電池パネルの方向は一定で安定して発電できます.(自動)
残念ながら,新しいルールには対応できませんでした.
発電する電力の大きさに頼った設計というのは,ちょっと失敗だったかもしれません.
メカが複雑で,摩擦ロスが大きく,重量もかさみますが,おもしろいから良いかと.
9.参考文献
「 やさしくわかる 歯車のしくみ 小林義行著 誠文堂新光社
タイトルの通りですが,歯車の仕組みが解説されています.
段ボールやケーキカップを使った,指南車を含む歯車工作がいろいろ紹介されています.
戻る